L'ultima versione del software di simulazione per robot :Gazebo 7
L'ultima versione del software di simulazione per robot :Gazebo 7

Gazebo 7 è l'ultima versione del software di simulazione Gazebo, che permette di testare gli algoritmi, preparare la struttura dei robot, vederne l'efficacia in situazioni reali. Un simulatore a tutto tondo e gratuito.Attualmente è supportato da Windows, Mac, linux in particolare è su ubuntu che si ha assicurato il corretto funzionamento del simulatore, mentre per Windows è richiesto uno spazio di memoria di 30Gb di storage, senza avere la sicurezza che funzioni.
Il linguaggio principale è il C++ , esempi, tutorial per cominciare con questo simulatore sono presenti nel sito quindi Don't worry con un po' di impegno Gazebo 7 sarà il vostro migliore amico.
per iniziale con Gazebo ----> : quickstartgazebo
e vi comparirà questa schermata, seguitela e avrete installato Gazebo:


per gli scettici che non credono che Gazebo sia realistico eccovi a voi le librerie da cui Gazebo è supportato :

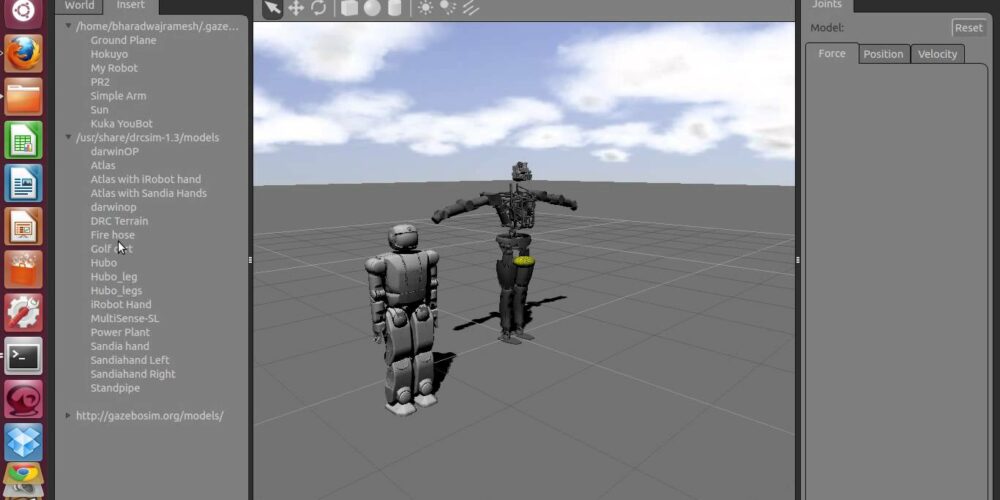
ma vediamo cosa offre Gazebo 7 :
Graphical Model Editor: invece di usare un file XML compilato da voi , potete creare il vostro robot utilizzando un sistema grafico user friendly.
Simulatore Aggiornato: include l'attrito torsionale e sensori delle fotocamere grandangolari per modellare accuratamente l'attrito di rotazione.
Il pulsante annulla che vi permette di annullare ogni azione
Supporto a lungo termine: Gazebo è rilasciato annualmente.
Tutorial: Una nuova serie di tutorial guidate progettata per i principianti .
altre notizie degne di nota è che la RoboCup 2016 sarà utilizzato ROS e Gazebo, inoltre Gazebo è ora fornito con un plug-in (sulla base di ArduPilot) che simula le forze di portanza e resistenza, che consente di giocare con droni e aircraft.
Il bello di Gazebo è che permette di simulare robot complessi come Atlas, Valkyrie o Robonaut 2.
 Gazebo è estremamente flessibile, modificando alcuni parametri run-time, è possibile passare da simulare centinaia di robot semplici ad un piccolo numero di robot complessi. Plugin, dispongono di un'interfaccia leggera che permettono agli utenti di personalizzare Gazebo, ed i sensori disponibili coprono la maggior parte delle piattaforme dei robot comuni.
Nessun altro simulatore dispone di quattro differenti motori fisici, e permette agli utenti di eseguire lo stesso codice sia su Gazebo che su un robot fisico.
Gazebo è estremamente flessibile, modificando alcuni parametri run-time, è possibile passare da simulare centinaia di robot semplici ad un piccolo numero di robot complessi. Plugin, dispongono di un'interfaccia leggera che permettono agli utenti di personalizzare Gazebo, ed i sensori disponibili coprono la maggior parte delle piattaforme dei robot comuni.
Nessun altro simulatore dispone di quattro differenti motori fisici, e permette agli utenti di eseguire lo stesso codice sia su Gazebo che su un robot fisico.
se volete scaricare Gazebo 7 ecco il link: Gazebo.org
[sdonations]1[/sdonations]
Tagged with: #robot, darpa, robocup, software di simulazione